
终于交作业了!!!零python经验看不懂ppt上的各种公式万分痛苦地肝了两个星期。虽然只完成了基础分最低的算法...
 没精力再单独写博客了,直接贴一下提交的文档吧。
没精力再单独写博客了,直接贴一下提交的文档吧。
1.程序概述
1.1 概述
程序基于拉格朗日视角,实现了基于WCSPH算法的三维流体模拟,演示了流体柱塌缩坠落并冲击容器的场景。
(效果图中mesh表面构建与平滑于Houdini中完成)
1.2 依赖库
taichi v1.2.2
( python 3.10 )
1.3 WCSPH算法
WCSPH(weakly compressible sph)算法属于SPH的显式求解算法,基于连续性方程、动量方程和状态方程,直接计算作用在各个颗粒上的压力、体力、粘聚力和表面张力的合力,继而求出加速度进而结合边界条件进行速度位置的更新。
WCSPH将液体密度视为一个变量,随粒子于每个状态更新。解算时每一帧的基本过程如下:
1.初始化粒子,为邻域搜索做准备;
2.计算粒子密度;
3.计算重力、压力、粘聚力、表面张力,根据加速度a更新粒子的速度v、位置x;
4.粒子可视化
2.程序结构
2.1 GLOBAL SETTINGS
模拟的宏观控制变量,包括taichi初始化(ti.init()),边界尺寸(Boundary), 流体尺寸(fluid), 粒子半径(particle_r), 输出控制(output)。
⚠: 默认taichi使用cuda构建。由于邻域搜索使用了taichi.algorithms.PrefixSumExecutor 并行求解前缀和,可能不支持部分类型的taichi构建。
2.2 PARTICLE PROPERTIES
粒子相关属性及储存空间。
常量
particle_2r 粒子直径
particle_h support radius,默认取值为4*particle_r
particle_V 粒子体积,球体体积近似值
particle_m 粒子质量,默认以水密度(1000)计算
particle_num 粒子数量
grid_size 网格边长,默认取值为particle_h
grid_num 网格数量
变量与场
particle_x 三维向量场 - 粒子位置
particle_v 三维向量场 - 粒子速度
particle_a 三维向量场 - 粒子加速度
particle_d 标量场 - 粒子密度
particle_p 标量场 - 粒子压强
particle_grid 三维向量场 - 粒子所在格id (用于邻域搜索)
由于邻域搜索时对粒子进行了再排序,这里还创建了x_buffer v_buffer grid_buffer grid_sort 等场。详见3.1节邻域搜索实现。
邻域搜索相关
grid_particles_num 标量场,每格粒子数
prefix_sum_executor 前缀和计算器,详见3.1节邻域搜索实现。
2.3 PARTICLE FUNCTIONS
粒子初始化与重排序的相关方法。
粒子初始化
init_fluid()
Func:根据fluid生成粒子坐标,并添加粒子;开始模拟前执行一次。
-
@ti.kernel add_particles(pos: ti.types.ndarray())Input:
init_fluid()计算的位置坐标序列;Func: 并行初始化粒子初始状态;
网格初始化
init_grid_system()
Func: 初始化网格系统;模拟的每帧计算前执行。包含以下三步:
-
@ti.kernel update_grid_id()Func: 计算每个粒子所在格,更新
particle_grid与grid_particles_num。 @ti.kernel PrefixSumExecutor.run(input_arr)
Func: 于原位计算grid_particles_num前缀和。
@ti.kernel rearrange_by_grid()
Func: 按照格顺序重新排列particle_x/v/a等粒子信息。
@ti.Func pos_to_index(pos)
Func: 由三维坐标计算三维的网格索引(grid_index)
-
@ti.Func flatten_grid_index(grid_index)Func: 由三维的网格索引计算一维的网格id(grid_id,即
grid_particles_num的序列索引值)
2.4 SPH PROPERTIES
SPH相关属性。
基础物理值
SPH_dt 迭代步长
SPH_g 重力加速度
SPH_viscosity 粘滞力系数
SPH_sur_tension 表面张力系数
SPH_d_0 参照密度,默认为水密度(1000).
WCSPH
WCSPH的压力求解公式为:
SPH_stiffness 压力公式中参数
SPH_exponent 压力公式中参数
SPH_collision_loss 粒子触壁反弹的速度损失
2.5 SPH FUNCTIONS
核函数
为保证导数的连续性,选用Cubic Spline Kernel(Monaghen 1992).
其中
@ti.func cubix_kernel(r)
Func: 计算核函数
@ti.func cubic_kernel_derivative(r)
Func: 计算核函数梯度
密度计算
WCSPH中压力的计算基于密度采样,因此首先对密度进行计算:
-
@ti.kernel compute_densities()Func: 计算粒子密度
加速度计算
根据N-S方程:
分别求解各部分力,与这些力贡献的加速度。
- 非压力项
重力
默认为重力加速度g:
@ti.kernel compute_gravity()
Func: 计算重力加速度。
粘滞力
使用了人工的粘滞阻力(artificial viscosity)。粘滞力的Anti-Symmetric Form计算公式为:
实际模拟中使用了标准形式的近似(Monaghan 2005),将二阶的
-
@ti.kernel compute_viscosity()Func: 计算粘滞力加速度。
表面张力
表面张力的求解参考了Becker 2007的方法:
-
@ti.kernel compute_sur_tension()Func: 计算表面张力的加速度。
- 压力项
对于WCSPH,其压力求解其实类似于理想气体方程(EOS) :
由于气液边界采样时粒子不足,
计算压强后即可求解压力贡献的加速度:
-
@ki.kernel compute_pressure()Func: 计算压强与压力产生的加速度。
显式积分
@ti.kernel advect()
Func: 辛欧拉法,用计算的加速度更新粒子速度,继而更新粒子位置。
边界条件
由于模拟的边界条件很简单,是与轴平行的正交平面,可直接通过坐标判断是否超出边界,对速度模拟计算触壁反弹。
@ti.kernel enforce_boundary()
Func: 更改粒子和速度,防止粒子超出边界。
Finally
-
WCSPH_step()Func: 按照顺序包含上述解算步骤:
init_grid_system() compute_densities() compute_gravity() compute_pressure() compute_viscosity() compute_sur_tension() advect() enforce_boundary()
2.6 DISPLAY PROPERTIES
可视化利用了taichi.GGUI系统,这部分设置了各类信息的显示颜色与边界可视化的顶点信息。
2.7 MAIN FUNCTION
主函数,主要步骤如下:
1.初始化流体粒子
2.初始化窗口
3.模拟计算
4.结果可视化
(5.输出.ply文件)
笔者硬件为NVIDIA RTX 2070, 若每迭代一次即绘制,约为155fps;为获得更符合现实的模拟效果,提交文件为每迭代10次后绘制一帧,约为20fps。
3.补充说明
3.1 操作说明
-
于GLOBAL SETTINGS代码块可修改边界尺寸/液柱尺寸。
- 运行
run_simulation.py即可。
3.2 邻域搜索
邻域搜索的实现主要使用了grid系统。最初写二维WCSPH时,使用了链表搜索的数据结构(如下图)。

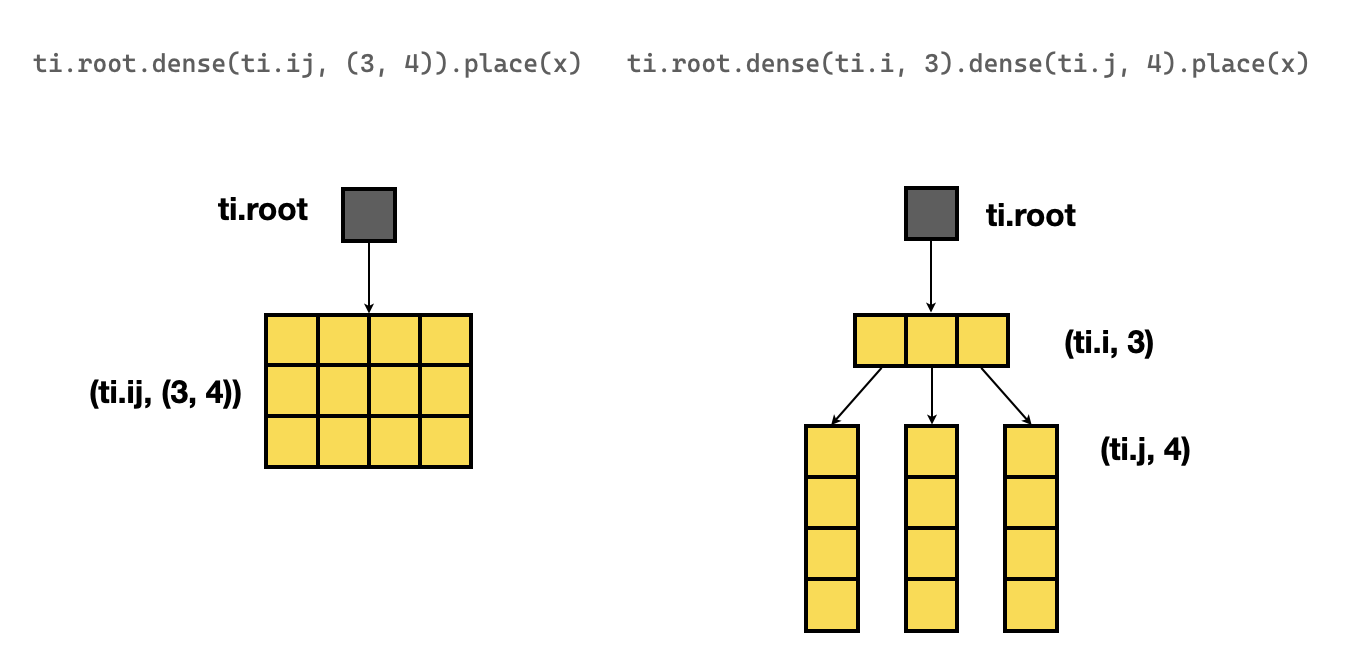
需定义每格最多的粒子数grid_max_particles,然后以此为长度开辟储存空间,保存每格的粒子序号;并以ti.root.X的方式构建数据间的链接关系(如下图,图源taichi doc)
但从二维扩展至三维时,由于维度的增加,所需的内存空间陡增。但哪怕taichi.init()时,声明分配更多的内存空间给运算,依然存在内存分配失败的问题。最终卡了很久后,转为以排序时间为代价节省每格的存储空间。实现主要参考:https://github.com/erizmr/SPH_Taichi/blob/master/particle_system.py
邻域搜索主要维护了两个列表:每格粒子所在格particle_grid与每格的粒子数grid_particles_num;前者的索引顺序与其他的粒子属性相同,长度为粒子数;后者的索引顺序是扁平化的格id(由flatten_grid_id()得到)。(如下图,自绘)
注:为避免混淆,所有三维的格索引称为grid_index,如(0,0,0);而一维的格索引称为grid_index, 如0.

在init_grid() 的过程中,首先会将grid_particles_num初始化为0,然后并行计算particle_grid,对对应格的grid_particles_num执行atomic_add().
其次计算前缀合,并根据grid的顺序,对所有particle参数重新排序,示例过程如下:(图源自绘)

重排序后,若想获取id为i的格内粒子,则以range(grid_particles_num[i-1],grid_particles_num[i])为索引序号查找粒子即可。(如下图,图源自绘)

3.3 可视化
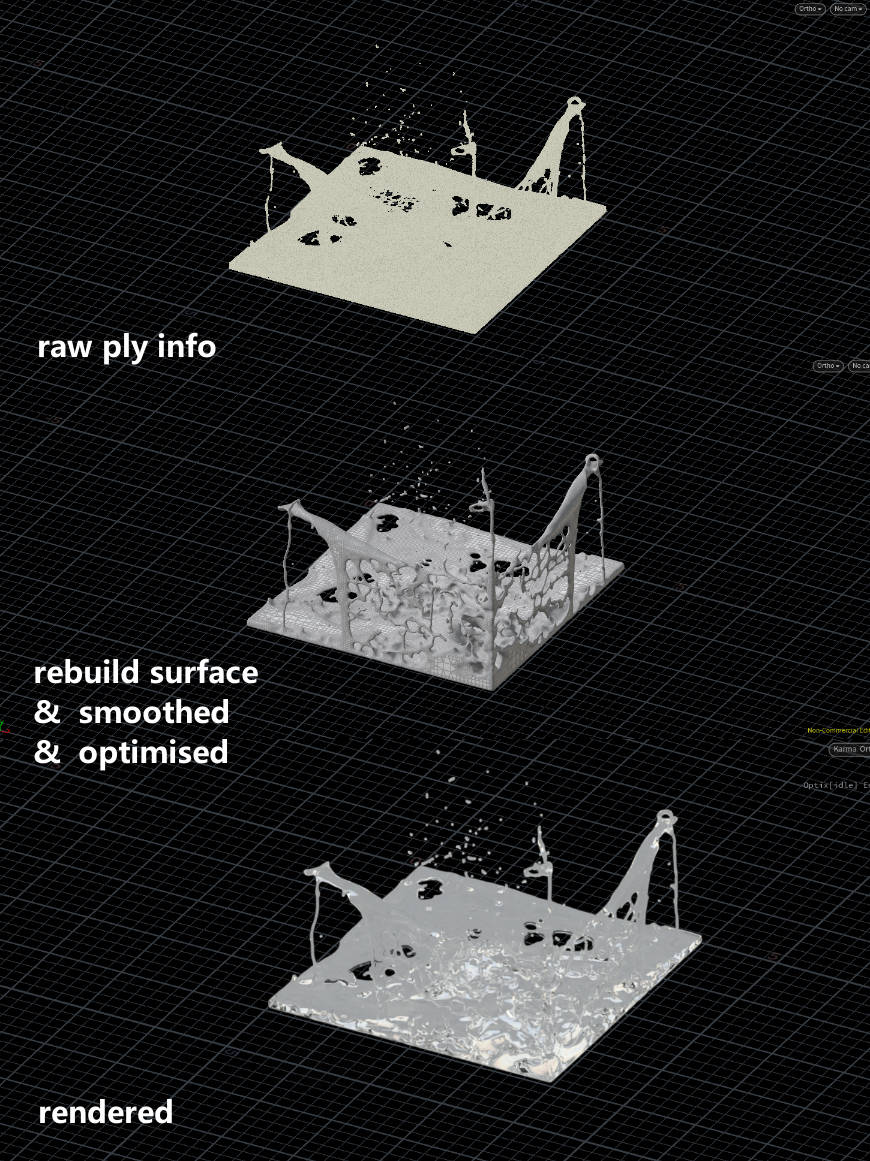
由于笔者代码功底较弱,选择使用Houdini来进行模拟结果的可视化。
taichi可将点云信息输出为.ply文件,以便Houdini读取。在Houdini中进行了表面的重建、网格平滑与网格简化。示例mp4中每20步输出一帧点云信息,渲染后以60fps输出视频(因为帧渲多了...)
4.参考
4.1 参考文献
- J. Monaghan, Smoothed Particle Hydrodynamics, “Annual Review of Astronomy and Astrophysics”, 30 (1992), pp. 543-574.
- M. Becker and M. Teschner (2007). "Weakly compressible SPH for free surface flows". In:Proceedings of the 2007 ACM SIGGRAPH/Eurographics symposium on Computer animation. Eurographics Association, pp. 209–217.
4.2 参考代码与教程
- SPlisHSPlasH tutorials
by ERIN.Z