
今天压ddl写完动画原理与算法的小作业,也是关于三维网格的题目。那么就先发出Mesh系列的第二篇——

(简化版)网格变形实操!

问题描述
拉普拉斯网格变形的基本思路是,对网格进行变形时(让控制点(anchor)在变形后处于目标位置),保持网格内在结构(保证顶点的相对坐标发生的变化尽可能小)
-
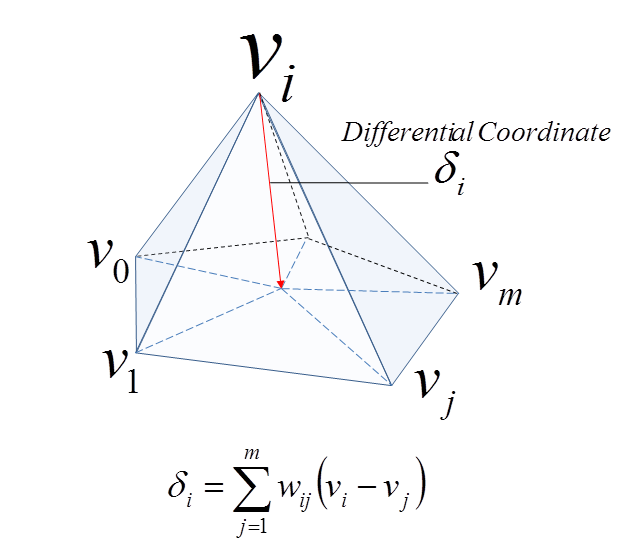
顶点的相对坐标的定义:
\delta_i = \mathscr{L}\left(\mathbf{v}_{i}\right)=\mathbf{v}_{i}-\frac{1}{d_{i}} \sum_{j \in \mathbb{N}_{i}} \mathbf{v}_{j} \ , \quad i=1, \ldots,n 其中
\mathbf{v_i} 是顶点i 的绝对坐标,\delta_i 是相对坐标,d_i 是顶点的度数,\mathbb{N}_i 是其邻域。 -
绝对坐标
V 与相对坐标\Delta 之间的转换:\Delta = (I - D^{-1}A)V = LV
其中A 是 0-1 邻接矩阵,D 是度数矩阵,L = (I - D^{-1}A) 是谱图论中的拉普拉斯矩阵
预备知识补充时间:
微分坐标系 Differential Coordinates
题目中提到的“相对坐标”即微分坐标,定义为“该点的全局坐标减去所有邻居顶点全局坐标的平均值”。
全局坐标和微分坐标之间的变换是线性的,因此可以表示为上文中的矩阵形式:
其中
拉普拉斯矩阵 Laplacian Matrix
拉普拉斯矩阵,也称调和矩阵。主要应用在图论中,作为一个图的矩阵表示。 它具有很多形式,最普通的拉普拉斯矩阵定义为
L=D-A 。常用的还有“对称规范化拉普拉斯矩阵 (Symmetric normalized Laplacian)”,
L^{sym}
本文中用到的是“RW规范化拉普拉斯矩阵 (Random walk normalized Laplacian)”,
L^{rw}
(打latex已经很熟练了....欣慰,感觉自己勉强达到了工科大学生大一水平)
微分坐标用于变形
微分坐标是一种内在的表示(Intrinsic surface representation),可以使得变形过程仍然保持局部细节,求解速度也很快。求解时满足两个条件:
- Detail constraints:
Lx = \delta - Modeling constraints:
x_j = c_j, j\in {j_1,j_2,...,j_k} 具体矩阵的求解过程太多数学了不是特别理解..大体上我们需要在 L$下方扩展k行(k为改变的锚点数),锚点所在点为1.
 不过求解的框架老师已经给搭好了,我们就边读边理解吧~!
不过求解的框架老师已经给搭好了,我们就边读边理解吧~!
求解算法
输入
- 变形前绝对坐标
V - 相对坐标
\Delta - 控制点集合
P_\text{anchors}
输出
- 变形后绝对坐标
V'
目标
- 保持
V’ 相对坐标与输入相对坐标\Delta 尽可能一致
- 要让控制点在变形后处于目标位置
实现
- 提示1: 采用最小二乘法求解;
- 提示2: 采用稀疏矩阵表示提高效率。
Code
在Jupyter Notebook环境下,作业使用Trimesh处理三维网格,用scipy.sparse处理稀疏矩阵。
# 导入必要的库
from trimesh import Scene
from mesh import TriMesh
import numpy as np
import io
from trimesh.viewer.notebook import scene_to_notebook
from scipy.sparse import coo_matrix
from scipy.sparse.linalg import lsqr
import matplotlib.pyplot as pltget_LeastSquareMatrix()函数需要求的就是上图中左侧的那一大坨矩阵,也是本次小作业中要实现的部分:
# 目的: 定义目标方程的左手边矩阵(稀疏表示)
def get_LeastSquareMatrix(adjacent_mat, anchors_indices):
# 输入: 三角网格的邻接矩阵表示, 控制点的索引
n = len(adjacent_mat.keys()) # 节点数
k = len(anchors_indices) # 控制点数
I = [] # 稀疏矩阵的非零行
J = [] # 稀疏矩阵的非零列
V = [] # 稀疏矩阵的非零值
# 任务一: 构建拉普拉斯稀疏矩阵
for i in range(n):
indices = adjacent_mat[i]
z = len(indices)
if(z!=0):
I.append(i)
J.append(i)
V.append(1)
for j in range(z):
I.append(i)
J.append(indices[j])
V.append(-1.0/z)
# 任务二: 行向下扩增K行 -- 控制点的约束默认最小二乘权重系数为1
for i in range(k):
anchor_idx = anchors_indices[i]
I.append(n+i)
J.append(anchor_idx)
V.append(1)
#输出: ((n+k) x n 的稀疏矩阵, n是连接节点数, k是控制点数量
L = coo_matrix((V, (I, J)), shape=(n + k, n)).tocsr()
return L使用上述的左侧矩阵构成方程,用最小二乘求解。
# 目的: 最小二乘求解求解得到变形后的节点位置
# 该函数不用修改
def solve_Laplacian(adjacent_mat, vertices_pos, anchors_indices, anchors_pos):
n = len(adjacent_mat.keys()) # 节点数
k = len(anchors_indices) # 控制点数
V_prime = np.zeros((n,3))
L = get_LeastSquareMatrix(adjacent_mat,anchors_indices) # 最小二乘矩阵
delta = np.array(L.dot(vertices_pos)) # 求解微分坐标
for i in range(k):
delta[n + i, :] = anchors_pos[i, :]
for i in range(3):
V_prime[:, i] = lsqr(L, delta[:, i])[0] # 求解最小二乘
return V_prime # 输出: 变形后的节点位置坐标中间设置网格的代码省略一部分~实际求解的运用如下:
mesh = TriMesh("./meshes/bunny.ply") # 导入三角网格文件
ori_mesh = mesh.get_mesh_copy()
scene_to_notebook(Scene([ori_mesh]))
...
adjacent_mat = mesh.get_neighbors() # 三角网格的邻接矩阵
vertices_pos = mesh.get_vertices() # 三角网格的节点坐标
############### 求解 Laplacian ###############
V_prime = solve_Laplacian(adjacent_mat,vertices_pos, anchors_idx, anchors_pos)
new_mesh = mesh.update_vertices(V_prime,inplace=True)
scene_to_notebook(Scene([new_mesh]))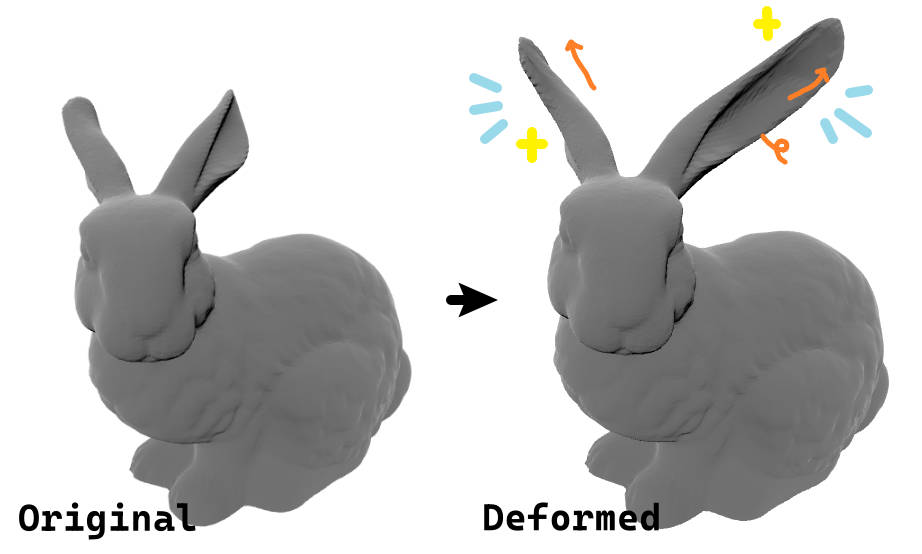
参考文献
- O. Sorkine, D. Cohen-Or, Y. Lipman, M. Alexa, C. Rössl, H.-P. Seidel. Laplacian surface editing. SGP '04: Proceedings of the 2004 Eurographics/ACM SIGGRAPH symposium on Geometry processing. July 2004, Pages 175–184.
by ERIN.Z